Библиотека сетевого анализа QGIS: описание и примеры
по адресу http://gis-lab.info/qa/qgis-network-analysis-lib.html
В статье описаны основные сведения и приемы работы с QGIS network-analysis library — библиотекой сетевого анализа ГИС Quantum GIS. Статья дополнена готовыми скриптами-примерами, которые можно использовать при разработке своих расширений.
QGIS network-analysis library — библиотека входящая в состав свободной ГИС Quantum GIS, которая:
- может создавать математический граф из географических данных (линейных векторных слоев), пригодный для анализа методами теории графов
- реализует базовые методы теории графов (в настоящее время только метод Дейкстры)
История
Библиотека QGIS network-analysis появилась путем экспорта базовых функций из плагина RoadGraph в отдельную библиотеку.
Начиная с ee19294562, появилась возможность использовать функционал библиотеки в своих расширениях, а также из Консоли Python QGIS.
Применение
Алгоритм применения библиотеки network-analysis можно записать в трех шагах:
- Получить граф из географических данных
- Выполнить анализ графа
- Использовать результат анализа в своих целях, например, визуализировать
Получение графа
Первое, что нужно сделать — это подготовить исходные данные, т.е. преобразовать векторный слой в граф. Все дальнейшие действия будут выполняться именно с этим графом.
В качестве источника графа может выступать любой линейный векторный слой. Узлы линий образуют множество вершин графа. В качестве ребер графа выступают отрезки линий векторного слоя. Узлы, имеющие одинаковые координаты, считаются одной и той же вершиной графа. Таким образом, две линии, имеющие общий узел, оказываются связанными между собой.
В дополнение к этому, при построении графа можно «привязать» к векторному слою любое количество дополнительных точек. Для каждой дополнительной точки будет найдено соответствие — либо ближайшая вершина графа, либо ближайшее ребро. В последнем случае ребро будет разбито на две части и будет добавлена новая общая вершина.


В качестве свойств ребер графа могут быть использованы атрибуты векторного слоя и протяженность (длина) ребра.
Реализация построения графа из векторного слоя использует шаблон программирования строитель. За построение графа дорог отвечает так называемый Director. В настоящее время бибилотека располагает только одним директором: QgsLineVectorLayerDirector. Директор задает основные настройки, которые будут использоваться при построении графа по линейному векторному слою, и «руками» строителя QgsGraphBuilder выполняет создание графа типа QgsGraph. В настоящее время, как и в случае с директором, реализован только один строитель: QgsGraphBuilder, создающий граф QgsGraph. При желании можно реализовать строителя, который будет строить граф, совместимый с такими библиотеками как BGL или networkX.
Для вычисления свойств ребер используется шаблон проектирования стратегия. Пока в библиотеке реализована только одна стратегия, учитывающая длину маршрута: QgsDistanceArcProperter. При необходимости, можно создать свою стратегию, которая будет учитывать необходимые параметры. Например, в модуле Road graph используется стратегия, вычисляющая время движения по ребру графа на основании длины ребра и поля скорости.
Рассмотрим процесс создание графа более подробно.
Чтобы получить доступ к функциям библиотеки сетевого анализа необходимо импортировать модуль networkanalysis
from qgis.networkanalysis import *
Теперь нужно создать директора
# не использовать информацию о направлении движения из атрибутов слоя, все дороги трактуются как двустронние
director = QgsLineVectorLayerDirector( vLayer, -1, '', '', '', 3 )
# информация о направлении движения находится в поле с индексом 5. Односторонние дороги с прямым направлением
# движения имееют значение атрибута "yes", односторонние дороги с обратным направлением — "1", и соответственно
# двусторонние дороги — "no". По умолчанию дороги считаются двусторонними. Такая схема подходит для использования
# c данными OpenStreetMap
director = QgsLineVectorLayerDirector( vLayer, 5, 'yes', '1', 'no', 3 )
В конструктор директора передается линейный векторный слой, по которому будет строиться граф, а также информация о характере движения по каждому сегменту дороги (разрешенное направление, одностороннее или двустороннее движение). Рассмотрим эти параметры:
- vl — векторный слой, по которому будет строиться граф.
- directionFieldId — индекс поля атрибутивной таблицы, которое содержит информацию о направлении движения. -1 не использовать эту информацию
- directDirectionValue — значение поля, соответствующее прямому направлению движения (т.е. движению в порядке создания точек линии, от первой к последней)
- reverseDirectionValue — значение поля, соответствующее обратному направлению движения (от последней точки к первой)
- bothDirectionValue — значение поля, соответствующее двустроннему движению (т.е. допускается движение как от первой точки к последней, так и в обратном направлении)
- defaultDirection — направление движения по умолчанию. Будет использоваться для тех участков дорог, у которых значение поля directionFieldId не задано или не совпадает ни с одним из вышеперечисленных.
Следующим шагом необходимо создать стратегию назначения свойств ребрам графа
properter = QgsDistanceArcProperter()
Сообщаем директору об используемой стратегии. Один директор может использовать несколько стратегий
director.addProperter( properter )
Теперь создаем строителя, который собственно и будет строить граф заданного типа.
Конструктор QgsGraphBuilder принимает следующие параметры:
- crs — используемая система координат. Обязательный параметр.
- otfEnabled — указывает на использование перепроецирования «на лету». По умолчанию true.
- topologyTolerance — топологическая толерантность. Значение по умолчанию 0.
- ellipsoidID — используемый эллипсоид. По умолчанию "WGS84".
# задана только используемая СК, все остальные параметры по умолчанию
builder = QgsGraphBuilder( myCRS )
Также можно задать одну или несколько точек, которые будет использоваться при анализе. Например так:
startPoint = QgsPoint( 82.7112, 55.1672 )
endPoint = QgsPoint( 83.1879, 54.7079 )
Затем строим граф и «привязываем» к нему точки
tiedPoints = director.makeGraph( builder, [ startPoint, endPoint ] )
Построение графа может занять некоторое время (зависит от количества объектов в слое и размера самого слоя). В tiedPoints записываются координаты «привязанных» точек. После построения мы получим граф, пригодный для анализа
graph = builder.graph()
Теперь можно получить индексы наших точек
startId = graph.findVertex( tiedPoints[ 0 ] )
endId = graph.findVertex( tiedPoints[ 1 ] )
Анализ графа
В основе сетевого анализа лежат задача связности вершин графа и задача поиска кратчайших путей. Для решения этих задач в библиотеке network-analysis реализован алгоритм Дейкстры.
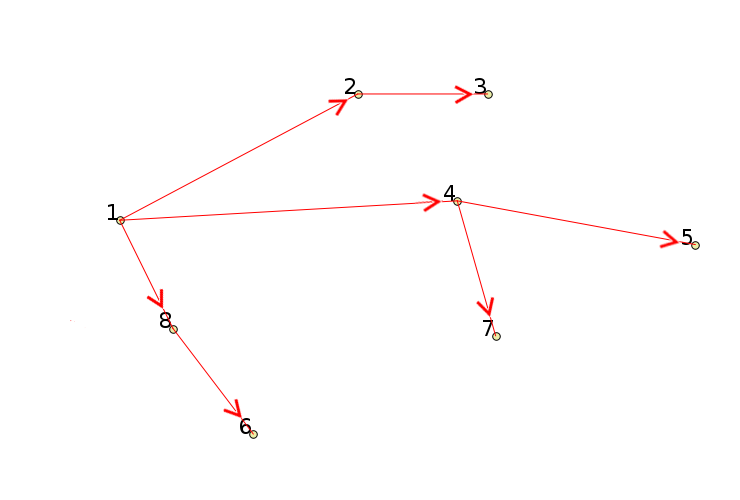
Алгоритм Дейкстры находит оптимальный маршрут от одной из вершин графа до всех остальных и значение оптимизируемого параметра. Хорошим способом представления результата выполнения алгоритма Дейкстры является дерево кратчайших путей.

Дерево кратчайших путей — это ориентированный взвешенный граф (точнее дерево) обладающий следующими свойствами:
- только одна вершина не имеет входящих в нее ребер — корень дерева
- все остальные вершины имеют только одно входящее в них ребро
- Если вершина B достижима из вершины A, то путь, соединяющий их, единственный и он же кратчайший (оптимальный) на исходном графе.
Дерево кратчайших путей можно получить вызывая методы shortestTree и dijkstra класса QgsGraphAnalyzer. Рекомендуется пользоваться именно методом dijkstra. Он работает быстрее и, в общем случае, эффективнее расходует память. Метод shortestTree может быть полезен в тех случаях когда необходимо совершить обход дерева кратчайших путей.
Метод shortestTree создает новый объект (всегда QgsGraph) и принимает три аргумента:
- source — исходный граф
- startVertexIdx — индекс точки на графе (корень дерева)
- criterionNum — порядковый номер свойства ребра (отсчет ведется от 0).
tree = QgsGraphAnalyzer.shortestTree( graph, startId, 0 )
Метод dijkstra имеет аналогичные параметры, но возвращает не граф, а кортеж из двух массивов. В первом массиве i-ый элемент содержит индекс дуги, входящей в i-ю вершину, в противном случае — -1. Во втором массиве i-ый элемент содержит расстояние от корня дерева до i-ой вершины, если вершина достижима из корня или максимально большое число которое может хранить тип С++ double (эквивалент плюс бесконечности), если вершина не достижима.
(tree, cost) = QgsGraphAnalyzer.dijkstra( graph, startId, 0 )
Вот так выглядит простейший способ отобразить дерево кратчайших путей с использованием графа, полученного в результате вызова метода shortestTree (только замените координаты начальной точки на свои, а также выделите слой дорог в списке слоёв карты). ОСТОРОЖНО: код создает огромное количество объектов QgsRubberBand, используйте его только для очень маленьких слоев.
from PyQt4.QtCore import *
from PyQt4.QtGui import *
from qgis.core import *
from qgis.gui import *
from qgis.networkanalysis import *
vl = qgis.utils.iface.mapCanvas().currentLayer()
director = QgsLineVectorLayerDirector( vl, -1, '', '', '', 3 )
properter = QgsDistanceArcProperter()
director.addProperter( properter )
crs = qgis.utils.iface.mapCanvas().mapRenderer().destinationCrs()
builder = QgsGraphBuilder( crs )
pStart = QgsPoint( -0.743804, 0.22954 )
tiedPoint = director.makeGraph( builder, [ pStart ] )
pStart = tiedPoint[ 0 ]
graph = builder.graph()
idStart = graph.findVertex( pStart )
tree = QgsGraphAnalyzer.shortestTree( graph, idStart, 0 )
i = 0;
while ( i < tree.arcCount() ):
rb = QgsRubberBand( qgis.utils.iface.mapCanvas() )
rb.setColor ( Qt.red )
rb.addPoint ( tree.vertex( tree.arc( i ).inVertex() ).point() )
rb.addPoint ( tree.vertex( tree.arc( i ).outVertex() ).point() )
i = i + 1
То же самое, но с использованием метода dijkstra:
from PyQt4.QtCore import *
from PyQt4.QtGui import *
from qgis.core import *
from qgis.gui import *
from qgis.networkanalysis import *
vl = qgis.utils.iface.mapCanvas().currentLayer()
director = QgsLineVectorLayerDirector( vl, -1, '', '', '', 3 )
properter = QgsDistanceArcProperter()
director.addProperter( properter )
crs = qgis.utils.iface.mapCanvas().mapRenderer().destinationCrs()
builder = QgsGraphBuilder( crs )
pStart = QgsPoint( -1.37144, 0.543836 )
tiedPoint = director.makeGraph( builder, [ pStart ] )
pStart = tiedPoint[ 0 ]
graph = builder.graph()
idStart = graph.findVertex( pStart )
( tree, costs ) = QgsGraphAnalyzer.dijkstra( graph, idStart, 0 )
for edgeId in tree:
if edgeId == -1:
continue
rb = QgsRubberBand( qgis.utils.iface.mapCanvas() )
rb.setColor ( Qt.red )
rb.addPoint ( graph.vertex( graph.arc( edgeId ).inVertex() ).point() )
rb.addPoint ( graph.vertex( graph.arc( edgeId ).outVertex() ).point() )

Нахождение кратчайших путей
Для получения оптимального маршрута между двумя произвольными точками используется следующий подход. Обе точки (начальная A и конечная B) «привязываются» к графу на этапе построения, затем при помощи метода shortestTree или dijkstra находится дерево кратчайших маршрутов с корнем в начальной точке A. В этом же дереве находим конечную точку B и начинаем спуск по дереву от точки B к точке А. В общем виде алгоритм можно записать так:
- присвоим Т = B
- пока Т != A цикл
- добавляем в маршрут точку Т
- берем ребро, которое входит в точку Т
- находим точку ТТ, из которой это ребро выходит
- присваиваем Т = ТТ
- добавляем в маршрут точку А
На этом построение маршрута закончено. Мы получили инвертированный список вершин (т.е. вершины идут в обратном порядке, от конечной точки к начальной), которые будут посещены при движении по кратчайшему маршруту.
Посмотрите еще раз на дерево кратчайших путей и представьте, что вы можете двигаться только против направления стрелочек. При движении из точки №7 мы рано или поздно попадем в точку №1 (корень дерева) и не сможем двигаться дальше.
Вот работающий пример поиска кратчайшего маршрута для Консоли Python QGIS (только замените координаты начальной и конечной точки на свои, а также выделите слой дорог в списке слоёв карты) с использованием метода shortestTree
from PyQt4.QtCore import *
from PyQt4.QtGui import *
from qgis.core import *
from qgis.gui import *
from qgis.networkanalysis import *
vl = qgis.utils.iface.mapCanvas().currentLayer()
director = QgsLineVectorLayerDirector( vl, -1, '', '', '', 3 )
properter = QgsDistanceArcProperter()
director.addProperter( properter )
crs = qgis.utils.iface.mapCanvas().mapRenderer().destinationCrs()
builder = QgsGraphBuilder( crs )
pStart = QgsPoint( -0.835953, 0.15679 )
pStop = QgsPoint( -1.1027, 0.699986 )
tiedPoints = director.makeGraph( builder, [ pStart, pStop ] )
graph = builder.graph()
tStart = tiedPoints[ 0 ]
tStop = tiedPoints[ 1 ]
idStart = graph.findVertex( tStart )
tree = QgsGraphAnalyzer.shortestTree( graph, idStart, 0 )
idStart = tree.findVertex( tStart )
idStop = tree.findVertex( tStop )
if idStop == -1:
print "Path not found"
else:
p = []
while ( idStart != idStop ):
l = tree.vertex( idStop ).inArc()
if len( l ) == 0:
break
e = tree.arc( l[ 0 ] )
p.insert( 0, tree.vertex( e.inVertex() ).point() )
idStop = e.outVertex()
p.insert( 0, tStart )
rb = QgsRubberBand( qgis.utils.iface.mapCanvas() )
rb.setColor( Qt.red )
for pnt in p:
rb.addPoint(pnt)
А вот пример с использованием метода dikstra
from PyQt4.QtCore import *
from PyQt4.QtGui import *
from qgis.core import *
from qgis.gui import *
from qgis.networkanalysis import *
vl = qgis.utils.iface.mapCanvas().currentLayer()
director = QgsLineVectorLayerDirector( vl, -1, '', '', '', 3 )
properter = QgsDistanceArcProperter()
director.addProperter( properter )
crs = qgis.utils.iface.mapCanvas().mapRenderer().destinationCrs()
builder = QgsGraphBuilder( crs )
pStart = QgsPoint( -0.835953, 0.15679 )
pStop = QgsPoint( -1.1027, 0.699986 )
tiedPoints = director.makeGraph( builder, [ pStart, pStop ] )
graph = builder.graph()
tStart = tiedPoints[ 0 ]
tStop = tiedPoints[ 1 ]
idStart = graph.findVertex( tStart )
idStop = graph.findVertex( tStop )
( tree, cost ) = QgsGraphAnalyzer.dijkstra( graph, idStart, 0 )
if tree[ idStop ] == -1:
print "Path not found"
else:
p = []
curPos = idStop
while curPos != idStart:
p.append( graph.vertex( graph.arc( tree[ curPos ] ).inVertex() ).point() )
curPos = graph.arc( tree[ curPos ] ).outVertex();
p.append( tStart )
rb = QgsRubberBand( qgis.utils.iface.mapCanvas() )
rb.setColor( Qt.red )
for pnt in p:
rb.addPoint(pnt)

Нахождение областей доступности
Назовем областью доступности вершины графа А такое подмножество вершин графа, доступных из вершины А, что стоимость оптимального пути от А до элементов этого множества не превосходит некоторого заданного значения.
Более наглядно это определение можно объяснить на следующем примере: «Есть пожарное депо. В какую часть города сможет попасть пожарная машина в за 5 минут, 10 минут, 15 минут?». Ответом на этот вопрос и являются области доступности пожарного депо.
Поиск областей доступности легко реализовать при помощи метода dijksta класса QgsGraphAnalyzer. Достаточно сравнить элементы возвращаемого значения с заданным параметром. Если величина cost[ i ] меньше заданного параметра или равна ему, тогда i-я вершина графа принадлежит множеству доступности, в противном случае — не принадлежит.
Не столь очевидным является нахождение границ доступности. Нижняя граница доступности — множество вершин которые еще можно достигнуть, а верхняя граница — множество вершин которых уже нельзя достигнуть. На самом деле все просто: граница доступности проходит по таким ребрам дерева кратчайших путей, для которых вершина-источник ребра доступна, а вершина-цель недоступна.
Вот пример
from PyQt4.QtCore import *
from PyQt4.QtGui import *
from qgis.core import *
from qgis.gui import *
from qgis.networkanalysis import *
vl = qgis.utils.iface.mapCanvas().currentLayer()
director = QgsLineVectorLayerDirector( vl, -1, '', '', '', 3 )
properter = QgsDistanceArcProperter()
director.addProperter( properter )
crs = qgis.utils.iface.mapCanvas().mapRenderer().destinationCrs()
builder = QgsGraphBuilder( crs )
pStart = QgsPoint( 65.5462, 57.1509 )
delta = qgis.utils.iface.mapCanvas().getCoordinateTransform().mapUnitsPerPixel() * 1
rb = QgsRubberBand( qgis.utils.iface.mapCanvas(), True )
rb.setColor( Qt.green )
rb.addPoint( QgsPoint( pStart.x() - delta, pStart.y() - delta ) )
rb.addPoint( QgsPoint( pStart.x() + delta, pStart.y() - delta ) )
rb.addPoint( QgsPoint( pStart.x() + delta, pStart.y() + delta ) )
rb.addPoint( QgsPoint( pStart.x() - delta, pStart.y() + delta ) )
tiedPoints = director.makeGraph( builder, [ pStart ] )
graph = builder.graph()
tStart = tiedPoints[ 0 ]
idStart = graph.findVertex( tStart )
( tree, cost ) = QgsGraphAnalyzer.dijkstra( graph, idStart, 0 )
upperBound = []
r = 2000.0
i = 0
while i < len(cost):
if cost[ i ] > r and tree[ i ] != -1:
outVertexId = graph.arc( tree [ i ] ).outVertex()
if cost[ outVertexId ] < r:
upperBound.append( i )
i = i + 1
for i in upperBound:
centerPoint = graph.vertex( i ).point()
rb = QgsRubberBand( qgis.utils.iface.mapCanvas(), True )
rb.setColor( Qt.red )
rb.addPoint( QgsPoint( centerPoint.x() - delta, centerPoint.y() - delta ) )
rb.addPoint( QgsPoint( centerPoint.x() + delta, centerPoint.y() - delta ) )
rb.addPoint( QgsPoint( centerPoint.x() + delta, centerPoint.y() + delta ) )
rb.addPoint( QgsPoint( centerPoint.x() - delta, centerPoint.y() + delta ) )

{kind=link}
Актуальная документация
Актуальную документацию всегда можно получить в разделе QGIS network analysis library описания QGIS API.